Introduction
One of the greatest benefits of the ADEPT Framework is the easy transition from virtual development and test to physical integration and verification. However, when your physical platform is mobile, such as a UAS, a solution is needed to extend your distributed framework from the laboratory to your mobile application. This web article presents one solution to this challenge.
Background
For this application, a novel UAS control system has been developed and tested using a digital twin in a virtual environment on a multi-core Xeon Linux rtx server. Now that a prototype device is available for flight test, it is desirable to extend the virtual environment to include the actual I/O on the actual UAS while in operation.
System Diagram
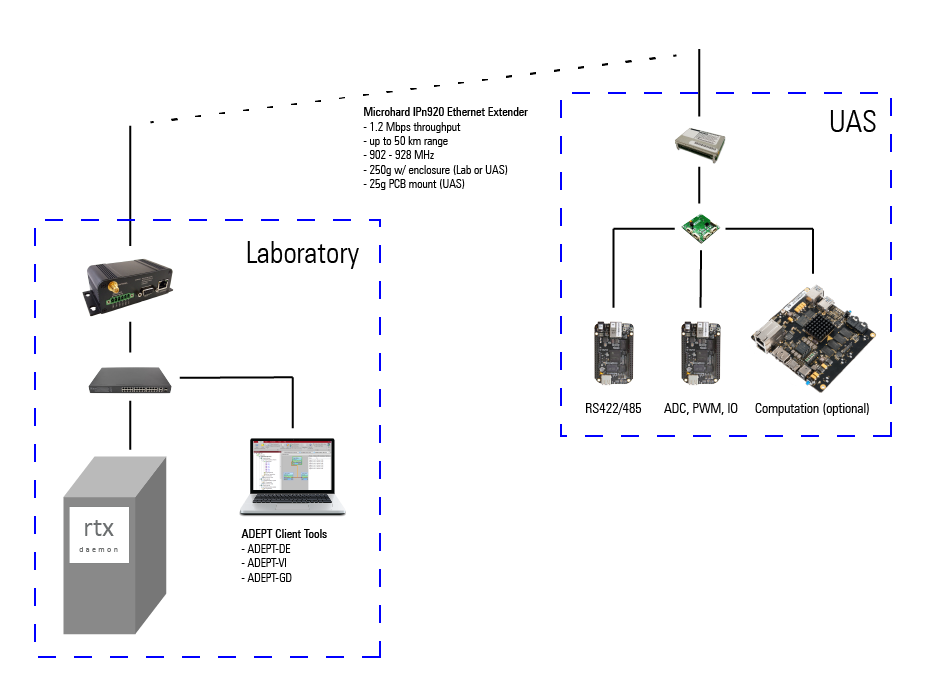
Figure 1: System Setup Diagram
Laboratory
| Component | Description |
|---|---|
| ADEPT client tools PC | Client PC that runs the ADEPT Framework Client tools to cross-compile and coordinate the models running on the rtx servers and to acquire data from the system during test for performance verification. |
| Multi-core Xeon
Linux rtx server |
The multi-core Xeon Linux rtx server is the main compute engine the runs the virtual environment and the UAS control algorithms. |
| Ethernet switch | The laboratory Ethernet switch is a standard 10/100MB switch. |
| Ethernet Extender | The laboratory Ethernet Extender included here is an off-the-shelf component from Microhard that extends an Ethernet network over an RF link. The specific device here is the IPn920 Ethernet Extender that supports a throughput of 1.2MBps, has a range of up to 50km and transmits in the 900MHz range. |
UAS
| Component | Description |
|---|---|
| Ethernet Extender | The UAS Ethernet Extender is the same IPn920 from Microhard, but the version pictured here is the PCB mount option that weighs only 25g. |
| Ethernet switch | Since weight is a vital concern for an application like this, the UAS Ethernet switch is a bare PCB switch that is only 38mm x 38mm. |
| BeagleBone Black rtx server(s) | The BeagleBone Black is an ideal candidate for providing IO interfaces on the UAS. Many IO options are available for this device, including RS422/485, ADC, PWM, GPIO, and many more. Each BeagleBone can support multiple IO, but it may be desirable to have two or more BeagleBones to dedicate each to specific IO. |
| BeagleBoard-X15 rtx server (optional) | The BeagleBoard-X15 has much more computational power than the BeagleBone Black, so if more compute resources are needed onboard the UAS, then an optional BeagelBoard-X15 can be included in the Framework. |
Discussion
Since the ADEPT Framework is based on the concept of data dictionary connections between interchangeable models, it is a natural transition from a digital twin model to a control model with I/O that extends into the real world. For this application, a complete digital twin has been developed in a virtual environment. In order to transition to the physical environment, a new Framework is assembled of the desired control models from the virtual environment, connected to the physical IO on the prototype vehicle.
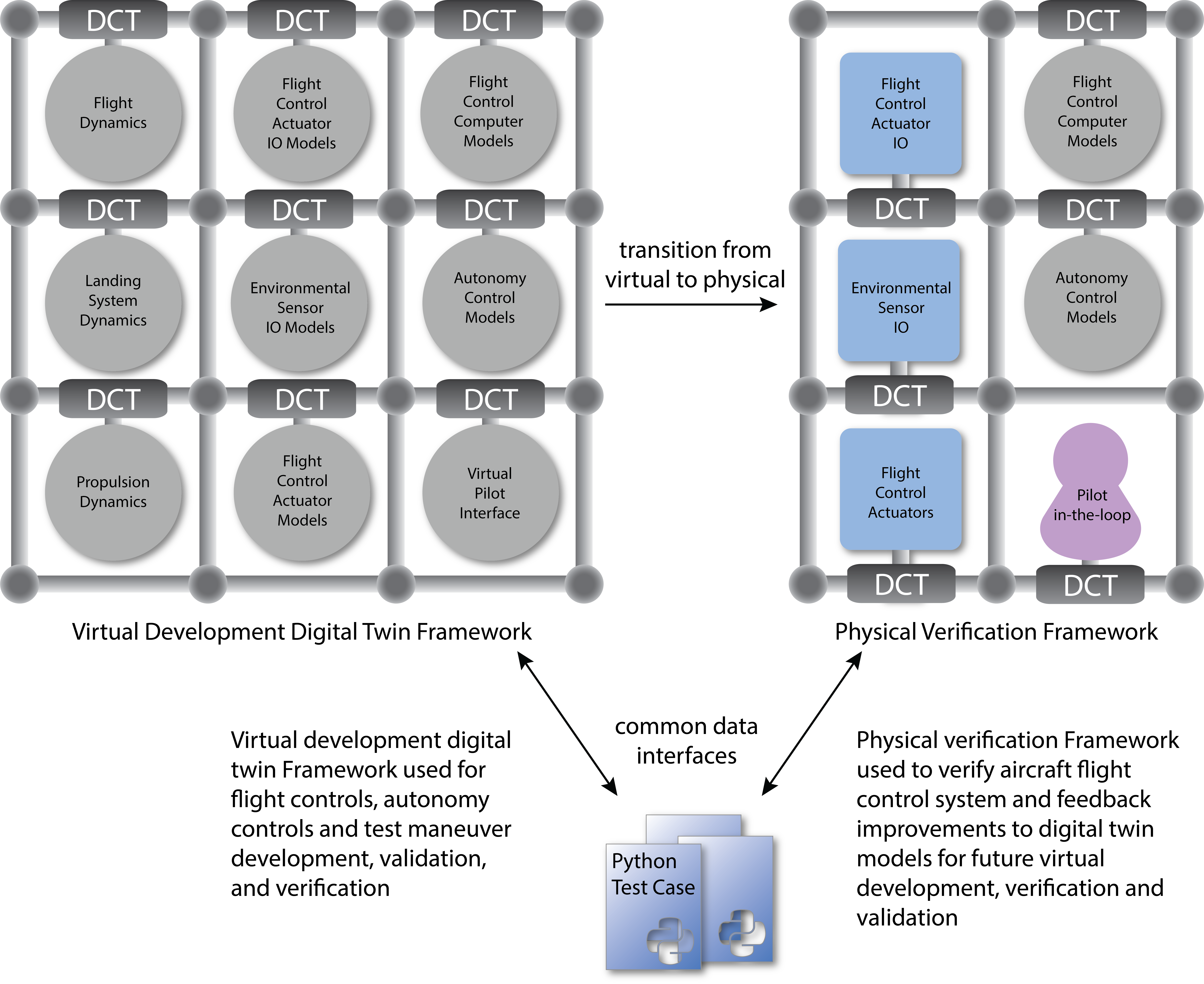
Figure 2: Transition from Virtual to Physical Framework
When data are gathered from the physical system, they can be used to verify the performance of the virtual system. Once the basic data coming from the physical system sufficiently match that of the virtual system then more advanced maneuvers and algorithms can be tested, both in the virtual and physical systems. After some iterations, the virtual environment and digital twin can be considered sufficiently verified such that an increased portion of future development, integration, verification and validation can be conducted virtually.
Conclusion
By including an Ethernet Extender in an ADEPT Framework, a system can bridge open space to provide the benefits of a 1:1 performance comparison of a digital twin in a virtual environment through to a physical prototype in the real world. This opens up two major benefits: 1) verification of digital twin in the real world and 2) verification of the virtual environment for increased confidence and benefit from virtual testing modifications and future applications.
Next Steps
For more information about this application, or to discuss a different question about the ADEPT Framework, please contact one of our experienced application engineers today. A contact form is provided for your convenience here.